Lunar Lava Tube Exploration
Artists rendering of the Axel rover descending into a lunar lava tube skylight as part of the Moon Diver mission. The Axel rover has power, communication, and support provided by a surface lander or vehicle. Credit: Kerber et al., 2018, video presentation.
Lava tubes on the Moon represent an enticing location for establishing lunar habitats. In addition to providing protection from radiation and meteorites, lunar lava tubes have a stable temperature range compared to surface conditions. These characteristics will allow the building of safe, yet economical habitats in lava tubes. However, we must first explore and categorize lava tubes before establishing the first settlements in them. One likely platform for enabling this exploration is via the Moon Diver mission and the tethered Axel rover.
Images of a potential 65 m diameter lunar lava tube skylight in the Marius Hills. Images c through f show the same skylight under different illumination conditions, with the arrows showing the angle of illumination. Images captures by SELENE Terrain Camera and Multi-band Imager in 2008 and 2009. Credit: Haruyama et al., 2009, Figure 1.
High resolution orbital imagery from JAXA Kaguya (SELENE) and NASA Lunar Reconnaissance Orbiter (LRO) have provided visual evidence of large, deep holes thought to be skylights into lava tubes. Vibrations from meteor impacts and Moonquakes likely caused roof collapses in near surface lava tubes, creating the skylights we see today.
Orbital imagery only shows basic information about the skylights, such as width, depth, and surface conditions. Determining the size and characteristics of the underground lava tubes requires observations beyond orbital imagery.
Gravity measurements provide one approach for determining underground structures. Launched in 2011, the twin NASA GRAIL spacecraft have detected large voids stretching from some skylights. This indicates the existence of lava tubes extending several dozen kilometers from some of these skylights.
Ground penetrating radar provides another tool for measuring underground structures. The Lunar Radar Sounder (LRS) on the SELENE orbiter has identified multiple features that exhibit the characteristics of underground lava tubes or cavernous voids. There is strong evidence for the existence of lava tubes when the LRS features overlap the GRAIL void features.
The next hurdle is to determine the exact conditions within the lava tubes. This includes their exact measurements, features, and characteristics. For this, in-situ robot observations are required.
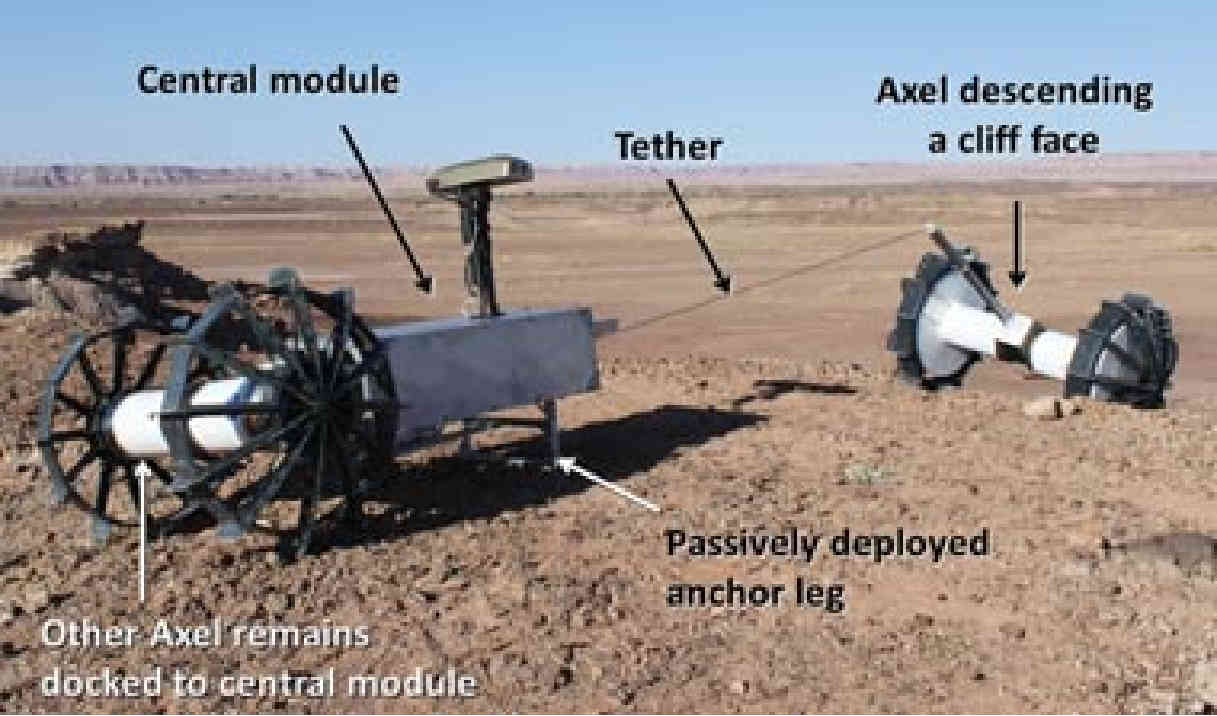


Challenges of exploring lunar lava tubes via skylights include descending vertically tens of meters, a lack of sunlight, and unknown surface conditions. The Jet Propulsion Laboratory (JPL) and Caltech designed Axel rover is a prime platform for these challenges. It is a two wheel rover that is anchored to a lander or surface vehicle via a tether. The wheels, central axle, and tether winch are each independently rotatable around one another. This allows freedom of movement while enabling the axle based science instruments to rotate into position (the instruments are housed within the wheels, but rotate with the axle and not the wheels). The tether provides power, communication, and support, enabling exploration through difficult environments.
The Moon Diver mission proposes using the Axel rover to rappel into and explore lunar pits, including lava tube skylights. During the descent, the Axel rover would examine and characterize exposed lava layers. Moon Diver's objective is to study mare basalts and in-place lunar stratigraphy. This would greatly expand our knowledge of the Moon's history, planetary evolution, and how our Solar System formed.
The Axel rover would continue to explore the bottom of the pit once it reaches the floor. For lunar habitat research, this is the most exciting part. Ideally, the floor would contain minimal debris, enabling the rover to explore the lava tube with the remainder of its tether (currently 250-300 m, but potentially up to 1 km).
What we find in lunar lava tubes is unknown, but they hold promise for providing stable environments for building the first human settlements on the Moon. Instead of burying surface structures under meters of regolith, why not build habitats within lava tubes? The observations from exploration rovers will advance our understanding of these environments.


References
Angelis, De Giovanni, et al. "Lunar lava tube radiation safety analysis." Journal of radiation research 43.Suppl (2002): S41-S45. DOI: 10.1269/jrr.43.S41.
Haruyama, Junichi, et al. "Possible lunar lava tube skylight observed by SELENE cameras." Geophysical Research Letters 36.21 (2009). DOI: 10.1029/2009GL040635. Link: https://agupubs.onlinelibrary.wiley.com/doi/pdf/10.1029/2009GL040635.
Huber, S. A., et al. "Astrobotic Technology: Planetary pits and caves for science and exploration." Annual Meeting of the Lunar Exploration Analysis Group. Vol. 1820. 2014. Link: https://www.hou.usra.edu/meetings/leag2014/pdf/3065.pdf.
Kaku, Tetsuya, et al. "Detection of intact lava tubes at Marius Hills on the Moon by SELENE (Kaguya) Lunar Radar Sounder." Geophysical Research Letters 44.20 (2017): 10-155. DOI: 10.1002/2017GL074998. Link: http://asrl.ua.edu/uploads/1/0/6/7/106772759/kaku_et_al-2017-geophysical_research_letters.pdf.
Kerber, L., et al. "Moon diver: A discovery mission concept for understanding the history of the mare basalts through the exploration of a lunar mare pit." New Views of the Moon 2-Asia. Vol. 2070. 2018. Link: https://www.hou.usra.edu/meetings/lpsc2018/pdf/1956.pdf.
Nesnas, Issa AD, et al. "Axel and DuAxel rovers for the sustainable exploration of extreme terrains." Journal of Field Robotics 29.4 (2012): 663-685. DOI: 10.1002/rob.21407.
Zacny, Kris, et al. "Axel rover NanoDrill and PowderDrill: Acquisition of cores, regolith and powder from steep walls." 2013 IEEE Aerospace Conference. IEEE, 2013. DOI: 10.1109/AERO.2013.6497188.








