Asteroid Exploration with an AMIGO
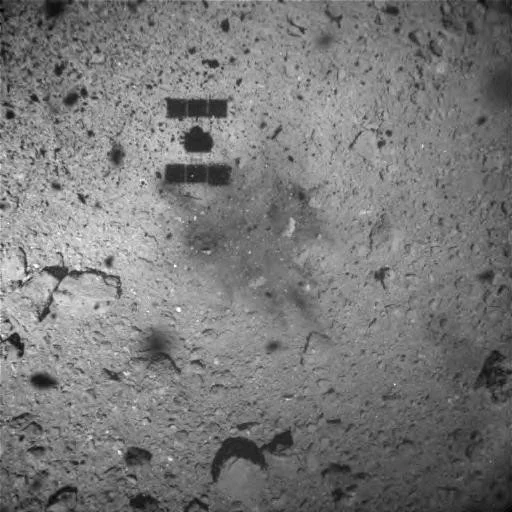
Surface of Ryugu taken from the MASCOT lander a few meters before touchdown. In-situ analysis of asteroids allows direct observations of regolith characteristics and inner structure analysis. Credit: MASCOT/DLR/JAXA.
Surveying the surface of asteroids is challenging. Asteroids of interest are often millions of kilometers away from Earth, have milli-gravity, and have variable lighting and surface conditions. Yet surface information is essential for planning resource exploration missions to them. A recently proposed semi-inflatable robot operating in a swarm may excel in this environment.
Illustration of the AMIGO robotic exploration lander. It is an autonomous semi-inflatable robot capable of operating in a swarm. The defining feature of AMIGO is its ability to move around asteroids and collect valuable surface observations. Credit: Wilburn et al. 2019, Figure 2.
A group of scientists from the Space and Terrestrial Robotic Exploration Laboratory at the University of Arizona presented the Asteroid Mobile Imager and Geologic Observer (AMIGO) at the 2019 AAS Guidance, Navigation and Control Conference in Breckenridge, Colorado. AMIGO is a novel approach for exploring the surface of an asteroid. It is an autonomous semi-inflatable robot that will operate in a swarm to study the surface of asteroids.
In-situ analysis allows observations we are unable to make using Earth based telescopes. Ideal observations include high resolution surface images, inner structure analysis, and surface characteristics. Potential unknowns include the surface texture, composition, temperature, and thermal conductivity.
The proposed goal is to send small robots to perform initial observations of a target object. Once the environment is understood, larger landers would be sent to do further exploration and processing. The Philae lander is a good case study in what can happen when a system is deployed to an asteroid without fully understanding the surface characteristics. Philae was deployed to the surface of 67P/Churyumov-Gerasimenko in 2014, however its harpoons failed to penetrate the surface deep enough. Philae subsequently bounced along the surface until it came to reset at a steep angle in the shadow of a cliff, which shortened its mission life from a few weeks to a few hours.

The complete AMIGO concept relies on a mother spacecraft deploying (1) multiple AMIGO landers that descend towards the asteroid’s surface. Before touchdown, each AMIGO inflates a 1 m sphere (3). On the surface, a stereo camera on top of the sphere collects observations (5). After sufficient observations are collected, each AMIGO can hop to a new area (8) via micro-thrusters and a reaction wheel. Credit: Wilburn et al. 2019, Figure 4.
Each AMIGO lander is stowed in a package the size of a 1U CubeSat (10x10x10 cm). Upon arrival at the target asteroid, a mother spacecraft would deploy multiple landers around the object. Each lander would inflate to a sphere about 1 meter in diameter that aids the lander in surface mobility. Micro-thrusters and a reaction wheel are used for orientation and softly landing on the surface.
The internals of the AMIGO. It measures 10x10x10 cm, or the size of a 1U CubeSat. Each AMIGO is a self contained unit, including systems for power, communication, inflation, science, and propulsion. Credit: Wilburn et al. 2019, Figure 3.
Each lander is independent, containing systems for power, communication (with the mother spacecraft), inflation, science, and propulsion/orientation. Once on the surface, each lander determines its position and location on the asteroid by on-board imaging and tracking the mother spacecraft. A stereo camera is placed on the top of the inflated bubble, providing a vantage point 1 m above the asteroid’s surface.
The key feature of the AMIGO lander is its ability to maneuver around the surface of the asteroid. This is done by hopping through the use of precise control actuators and intelligent control algorithms.

The thruster chip that propels AMIGO. Each chip contains eight thrusters capable of producing 30 micro-Newtons of thrust. These thrusters only provide torque on the x and y body. A reaction wheel provides torque on the z axis. Credit: Wilburn et al. 2019, Figure 7.
Both micro-thrusters and a reaction wheel are used to move each lander. The thrusters use sublimated cold gas to provide 30 micro-Newtons of thrust for each of the eight thrusters. However, the thrusters are only aligned along the x and y body axes. A reaction wheel is used to control the z axis of the body.
Three modes of movement are used by AMIGO, including up-righting maneuvers, rotation during hops, and ballistic hopping. The up-righting maneuver allows the lander to 'pick itself up' if it falls over or lands sideways. The inflated bubble is key for allowing this feature because it limits the chance of the lander getting stuck between obstacles. Rotation during hops is used to provide fine attitude adjustments during hops. Ballistic hopping is AMIGO's ace ability, allowing it to explore large areas of the asteroid's surface by hopping to new areas.
Graphic illustrating a ballistic hopping trajectory from an initial position to the target position, via two intermediary way points. This example uses the asteroid Itokawa because high-fidelity shape models are available for it now, and it’s size and mass are similar to that of asteroid Bennu. Credit: Wilburn et al. 2019, Figure 9.
This concept is still at an early TRL (Technology Readiness Level), so many characteristics are still being evaluated. For instance, possible materials for the inflatable structure are being studied. Two options include a soft material and a material that becomes rigid after exposure to UV light. Also, the thruster assembly and control algorithms need to be further tested.
The AMIGO semi-inflatable lander promises good possibilities for future asteroid exploration. Small, cheap, and robust systems need to be developed for efficient asteroid exploration missions. We think every asteroid should be excited by the prospect of having an AMIGO come visit it.
References
Wilburn, Greg, et al. "Guidance, Navigation and Control of Asteroid Mobile Imager and Geologic Observer (AMIGO)." arXiv preprint arXiv:1902.02071 (2019). https://arxiv.org/abs/1902.02071